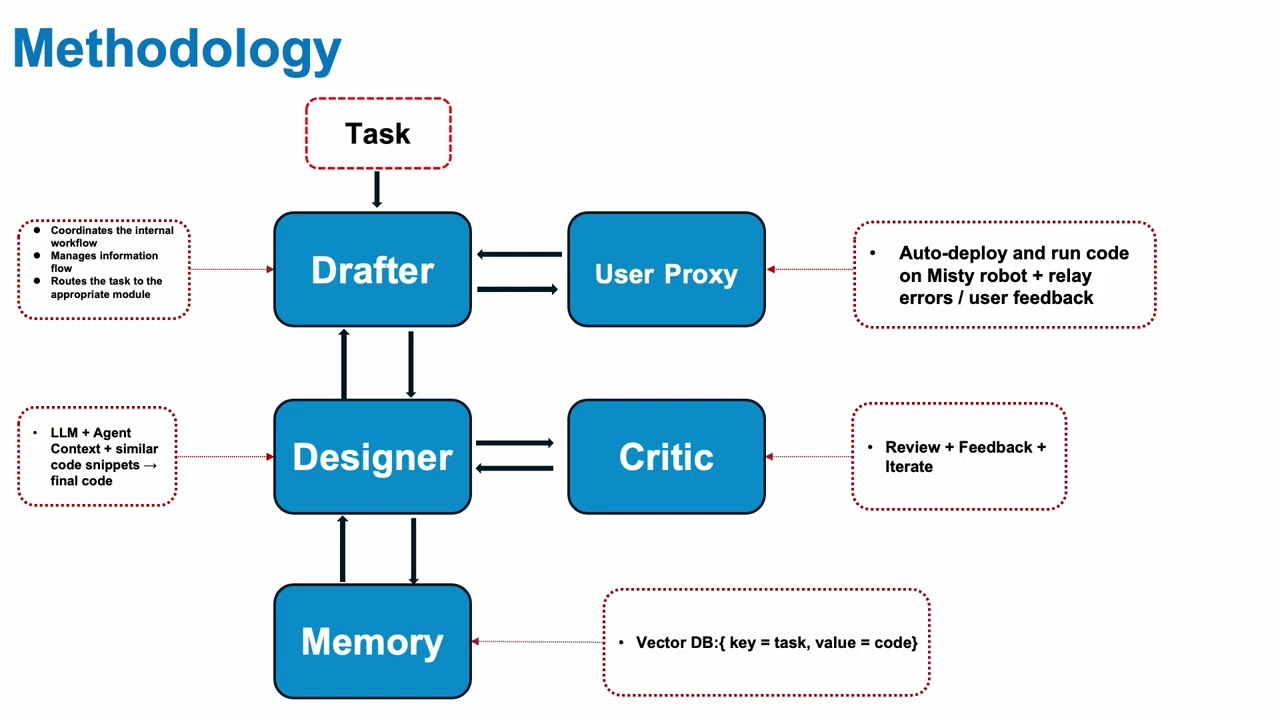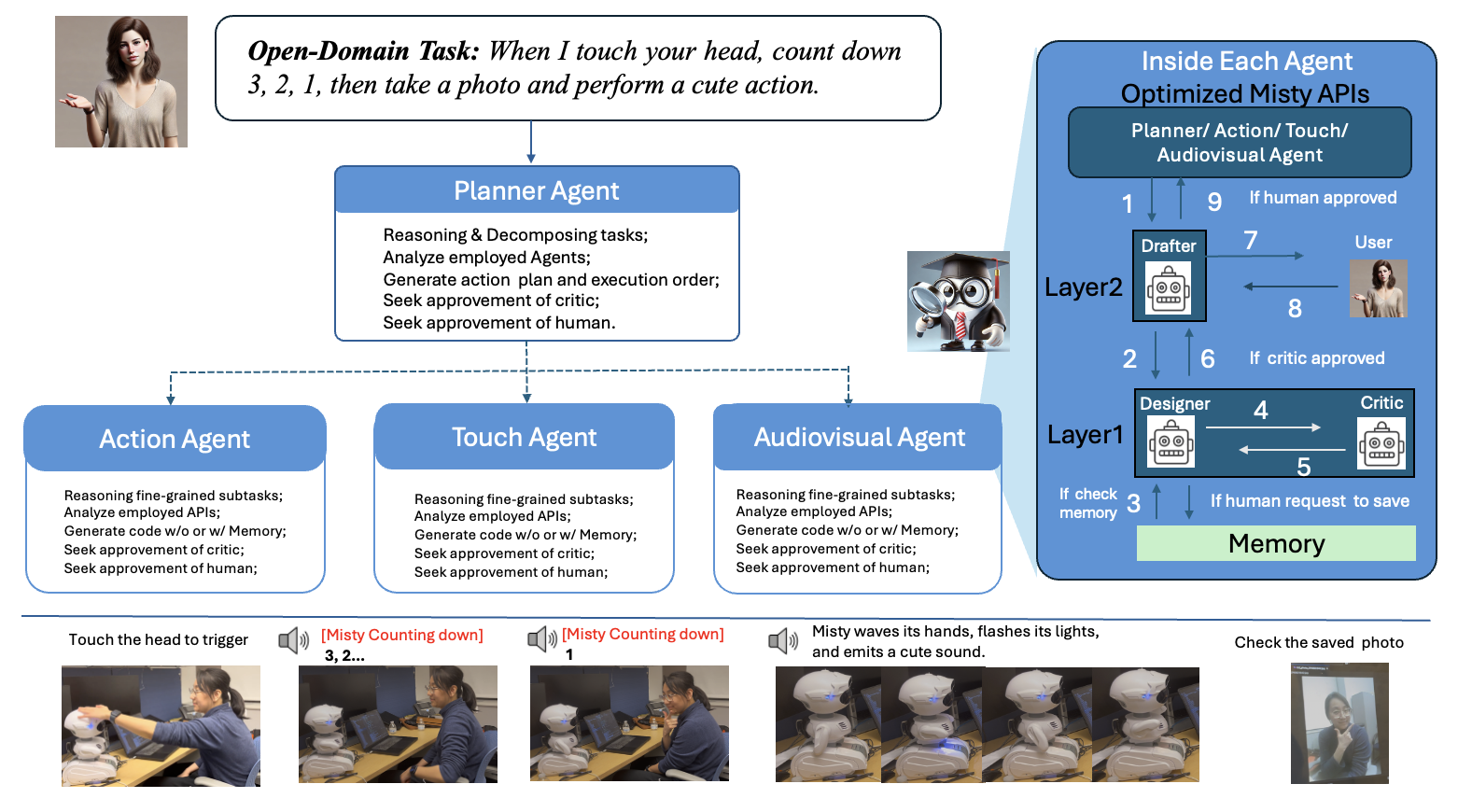
The social robot's open API allows users to customize open-domain interactions. However, it remains inaccessible to those without programming experience. We introduce AutoMisty, the first LLM-powered multi-agent framework that converts natural-language commands into executable Misty robot code by decomposing high-level instructions, generating sub-task code, and integrating everything into a deployable program. Each agent employs a two-layer optimization mechanism: first, a self-reflective loop that instantly validates and automatically executes the generated code, regenerating whenever errors emerge; second, human review for refinement and final approval, ensuring alignment with user preferences and preventing error propagation. To evaluate AutoMisty's effectiveness, we designed a benchmark task set spanning four levels of complexity and conducted experiments in a real Misty robot environment. Extensive evaluations demonstrate that AutoMisty not only consistently generates high-quality code but also enables precise code control, significantly outperforming direct reasoning with ChatGPT-4o and ChatGPT-o1.
@inproceedings{wang2025automisty,
title = {AutoMisty: A Multi-Agent LLM Framework for Automated Code Generation in the Misty Social Robot},
author = {Wang, Xiao and Dong, Lu and Rangasrinivasan, Sahana and Nwogu, Ifeoma and Setlur, Srirangaraj and Govindaraju, Venu},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2025}
}